-
详细信息
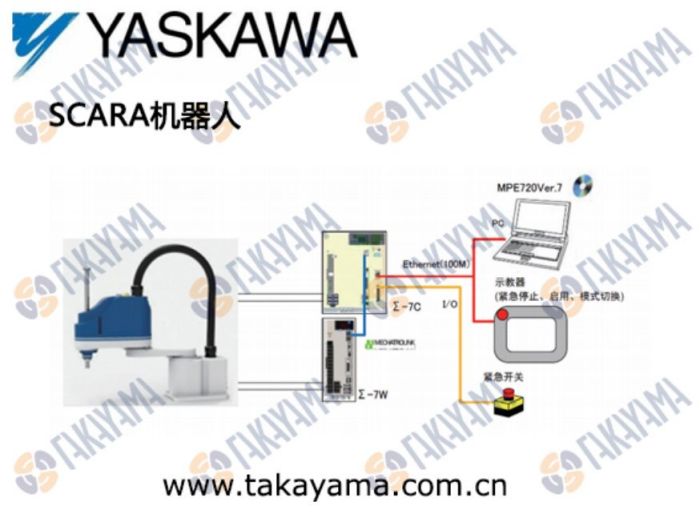
SCARA机器人是一种圆柱坐标型的特殊类型的工业机器人。它*适用于平面定位,垂直方向进行装配的作业。我司开发的SCARA机器人控制系统基于安川控制器MP3000系列和Z-7C,伺服放大器推荐使用支持M-Ⅲ的Z-7系列。
·SCARA机构的控制轴数为4轴。
·正交坐标系为(X,Y,Z,O),轴坐标系为(UT1,JT2JT3,JT4)。
轴坐标系是指SCARA机构的关节角度、滚珠丝杠的直动距离
等以各轴为基准的坐标系。
正交坐标系是指SCARA机构手部的正交坐标系的位置。
·单位、分辨率如下所示:
X:[0.001MM]、Y:[0.001MM]、
z:[0.001MM]、O:[0.001DEG]、
JT1:[0.001DEG]、JT2:[0.001DEG]、
JT3:[0.001MM]、JT4:[0.001DEG]
·使用正交坐标系(X,Y,Z,O)指定目标位置时,进行内部坐标转
换运算,将(X,Y,Z,O)转换成UT1,JT2,JT3,JT4)并发出指令。
·SCARA轴使用运动程序生成指令,在正交坐标系指令下通过
追踪虚拟轴来驱动实际轴。 -
-
济南高山自动化科技有限公司
伺服电机、运动控制器、工业机器人、变频器、减速机、滤波器、人机界面
安川机器人控制系统SCARA
页面价格仅供参考,具体请联系报价价格 价格电议,您可以向供应商询价得到该产品价格- 产品型号:SCARA
- 品 牌:安川
- 所 在 地:山东济南
- 更新日期:2025-12-01
合计:1台总价:电议内容声明:谷瀑为第三方平台及互联网信息服务提供者,谷瀑(含网站、客户端等)所展示的商品/服务的标题、价格、详情等信息内容系由店铺经营者发布,其真实性、准确性和合法性均由店铺经营者负责。谷瀑提醒您购买商品/服务前注意谨慎核实,如您对商品/服务的标题、价格、详情等任何信息有任何疑问的,请在购买前通过谷瀑与店铺经营者沟通确认;谷瀑上存在海量店铺,如您发现店铺内有任何违法/侵权信息,请在谷瀑首页底栏投诉通道进行投诉。济南高山自动化科技有限公司 地址: 济南市天桥区汇聚大厦

